Eurecat implementa una solució robòtica per al reciclatge avançat en bateries de vehicles elèctrics
El procés té com a objectiu desenvolupar processos sostenibles, innovadors i eficients per minimitzar l’impacte sostenible
Categories:
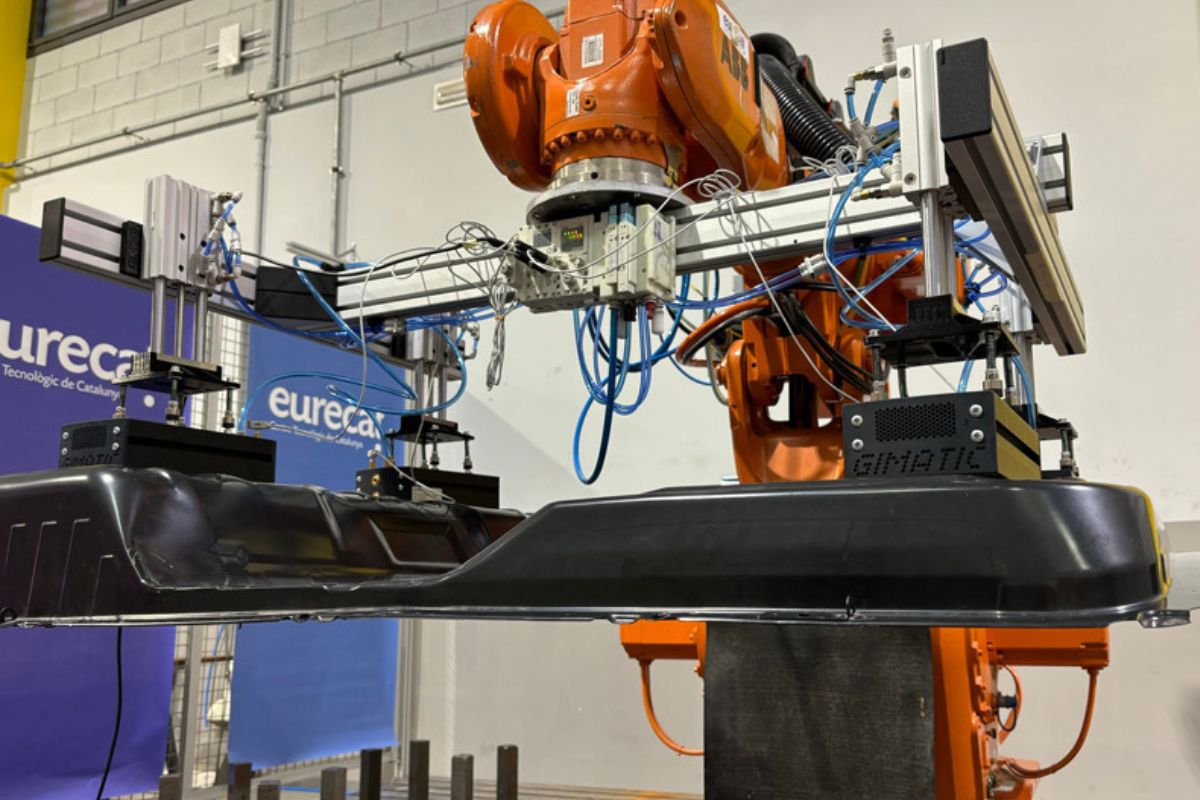
El centre tecnològic Eurecat ha desenvolupat una solució de robòtica col·laborativa per al desmantellament i el reciclatge avançat de bateries de vehicles elèctrics. L'objectiu és millorar els costos operatius, garantir l’extracció dels materials valuosos de les piles i minimitzar-ne l’impacte ambiental.
Cada bateria de vehicle elèctric és única i, per això, “el seu desmuntatge requereix una adaptació contínua que implica ajustos específics de paràmetres i l’ús de tecnologies avançades com la visió artificial per garantir un desmuntatge precís i no destructiu, que permeti la recuperació eficient dels materials que contenen”, explica l’investigador de la Unitat de Robòtica i Automatització d’Eurecat Eric Domingo.
Aquesta iniciativa, que es troba en el marc del projecte europeu Free4Lib, permetrà que l’operari pugui dur a terme tasques de més valor afegit al mateix espai de treball que el robot, al qual se li ha acoblat un tornavís industrial per utilitzar les diferents eines que necessita en cada fase del desmuntatge. En aquesta línia, la màquina pot identificar la posició dels caragols usant una càmera de profunditat embarcada i els detecta mitjançant un entrenament realitzat amb l’algorisme You Only Look Once (YOLO).
D’altra banda, l'androide s’ha muntat sobre un eix lineal extern, que li proporciona la capacitat de moure’s al llarg de tota la bateria per a un desmantellament complet i eficient. Finalment, el desenvolupament del comportament del maquinari s’ha realitzat mitjançant Behaviour Tree, una biblioteca desenvolupada al centre tecnològic i dissenyada per crear arbres de comportament per a la planificació de tasques dels sistemes robòtics.